PWNABLE KR - TODDLER - leg - 2pt
ARM에 대해서는 x86보다는 많이 본 편이었지만(예전에 mobile exploit 분석하느라 울며 겨자먹기 식으로 조금 공부..) 생각보다는 어렵게 풀었다. 역시 2점짜리 문제는 1점짜리보다 2배 어려워
ARM에서 r0가 리턴값을 저장하고 swi나 system call은 r7에서 수행된다는 점 정도는 알고 있음
관련한 내용은 아래 링크 참조. 예전에 이승진 사장님이 알려준 사이트인데, 이거보다 좋은 레퍼런스를 찾기도 힘듬.. ARM shellcode - Shellstorm
0.우선은 소스코드 살펴보기
파일은 2개가 주어지는데, 첫 번째 파일은 text 형식으로 leg.asm이 주어지고, 두번째는 inline asm이 포함되어 있는 leg.c 파일이다.
int main(){
int key=0;
printf("Daddy has very strong arm! : ");
scanf("%d", &key);
printf("key : %x\n", key1()+key2()+key3());
if( (key1()+key2()+key3()) == key ){
printf("Congratz!\n");
int fd = open("flag", O_RDONLY);
char buf[100];
int r = read(fd, buf, 100);
write(0, buf, r);
위에서와 같이 입력된 값이 inline asm의 결과값만 같으면 통과되는 문제인데 솔직히 아주 쉽게 생각했다. 이유는, printf()로 찍어보면 되겠구나~~ 해서 얼른 qemu와 arm-gdb를 설치했음
$ sudo apt-get install qemu
$ sudo apt-get install arm-linux-eabi-gcc
$ sudo apt-get install arm-none-eabi-gdb
...
결론적으로 이 방법은 실패했는데, 아래 그림과 같이 값(key1()+key2()+key3)이 계속 이동하고 있었기 때문임.
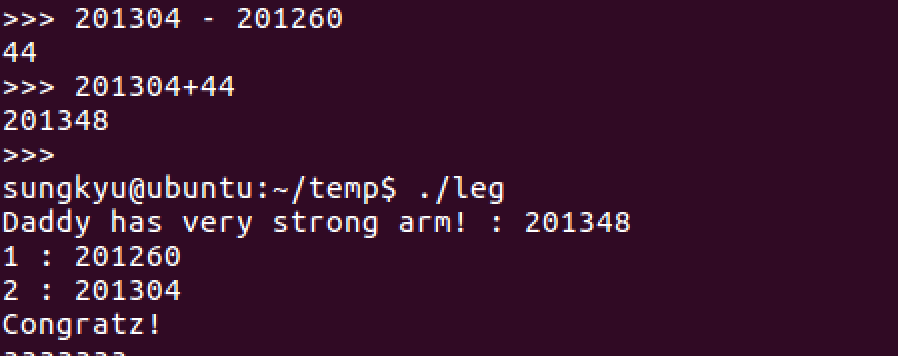
즉, 뭔가 리턴값이 주소와 관계된 것이라는 것을 알고 이 때부터 본격적인 분석작업 시작..
1.Check it up
- asm 코드는 생각보다 복잡한 것은 없음
key1()- 결국$pc를$r0에 넣는 것이므로$pc값을 찾으면 됨0x00008cd4 <+0>: push {r11} ; (str r11, [sp, #-4]!) 0x00008cd8 <+4>: add r11, sp, #0 0x00008cdc <+8>: mov r3, pc 0x00008ce0 <+12>: mov r0, r3 0x00008ce4 <+16>: sub sp, r11, #0 0x00008ce8 <+20>: pop {r11} ; (ldr r11, [sp], #4) 0x00008cec <+24>: bx lrkey2()- 다소 복잡해보이지만,$pc를$r3에 넣고, 4를 더한 후$r0에 넣으므로 이것도$pc찾는 게 핵심0x00008cf0 <+0>: push {r11} ; (str r11, [sp, #-4]!) 0x00008cf4 <+4>: add r11, sp, #0 0x00008cf8 <+8>: push {r6} ; (str r6, [sp, #-4]!) 0x00008cfc <+12>: add r6, pc, #1 0x00008d00 <+16>: bx r6 0x00008d04 <+20>: mov r3, pc 0x00008d06 <+22>: adds r3, #4 0x00008d08 <+24>: push {r3} 0x00008d0a <+26>: pop {pc} 0x00008d0c <+28>: pop {r6} ; (ldr r6, [sp], #4) 0x00008d10 <+32>: mov r0, r3 0x00008d14 <+36>: sub sp, r11, #0 0x00008d18 <+40>: pop {r11} ; (ldr r11, [sp], #4) 0x00008d1c <+44>: bx lrkey3()- link register($lr) 값이므로 리턴 이후 값만 찾으면 됨0x00008d20 <+0>: push {r11} ; (str r11, [sp, #-4]!) 0x00008d24 <+4>: add r11, sp, #0 0x00008d28 <+8>: mov r3, lr 0x00008d2c <+12>: mov r0, r3 0x00008d30 <+16>: sub sp, r11, #0 0x00008d34 <+20>: pop {r11} ; (ldr r11, [sp], #4) 0x00008d38 <+24>: bx lr-
따라서, leg.asm 파일에 주어진 주소를 기반으로
key1, key2, key3값이 각각0x8ce0, 0x8d0c, 0x8d80으로 보아 합한 후 답을 입력하였지만 답이 안나옴.. 뭔가 이상하다 싶어서 아래와 같이 동적분석 시도 - qemu와 gdb를 연결하고 c 파일을 컴파일하여 동적분석을 시작
(gdb server)
sungkyu@ubuntu:~/temp$ qemu-arm -g 1234 ./leg
(gdb client)
sungkyu@ubuntu:~/temp$ arm-none-eabi-gdb
...
(gdb) file leg
(gdb) target remote :1234
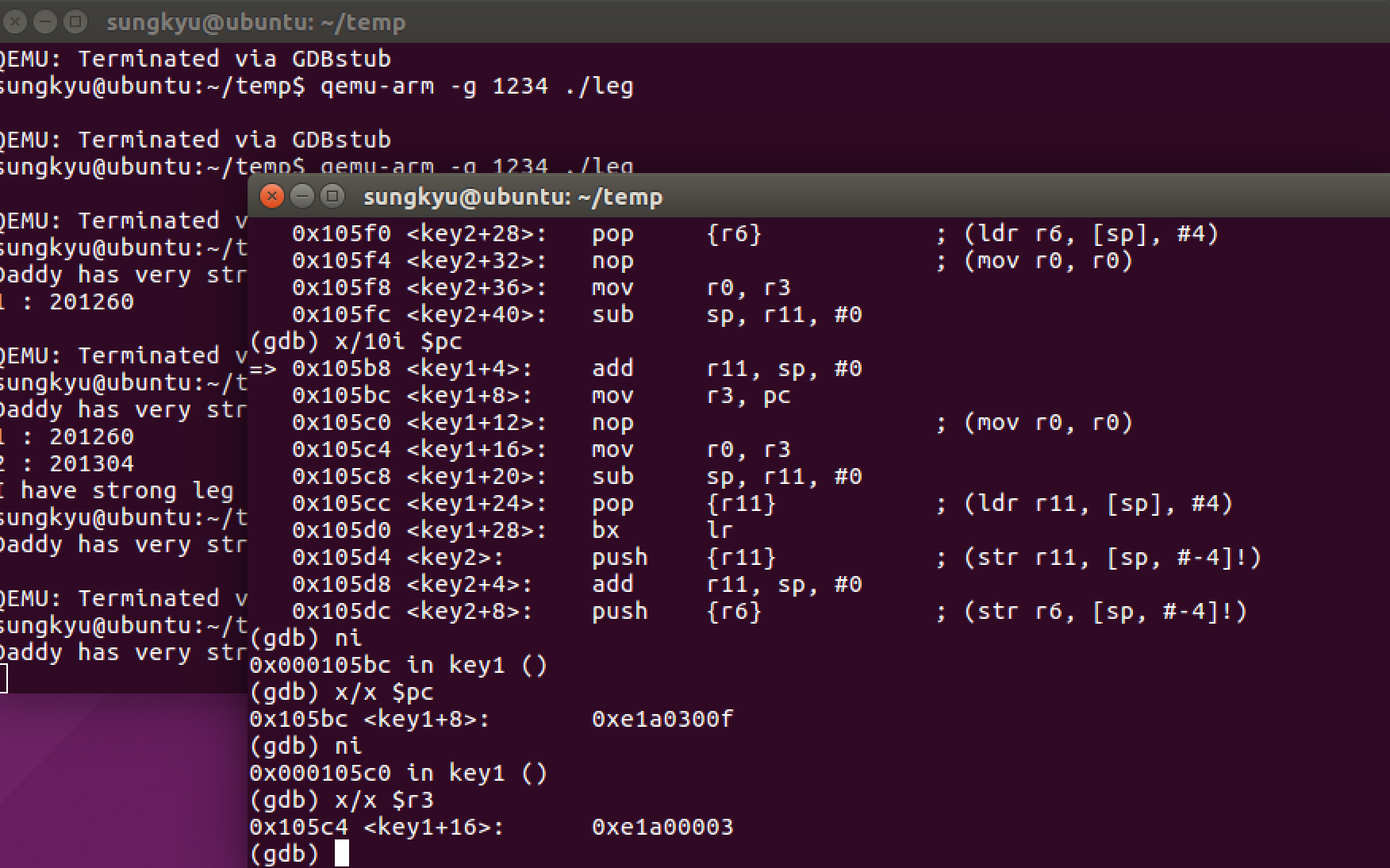
- 한참을 디버깅을 하는데, 문제는 엉뚱한 곳에서 찾았다. 지금까지
$pc는 그냥 다음에 수행할 명령어의 주소로 알고 있었는데.. -
아래와 같이 다음다음 주소를 참조하는 경우 가 있었던 것이다. (아래는
$pc가 저장된 시점이 0x105ea이기 때문에0x105ea가 저장되었을 것으로 예측했는데 실제로$r3에 저장된 것은0x105ec인 상황임)(gdb) x/3i $pc-2 0x105e8 <key2+20>: mov r3, pc => 0x105ea <key2+22>: adds r3, #4 0x105ec <key2+24>: push {r3} 0x000105ea in key2 () (gdb) x/x $r3 0x105ec <key2+24>: 0xbd00b408 (gdb)- 내가
$pc에 저장되는 방법을 잘 모르나 싶어서 구글에ARM mov pc register라고 검색하니 첫 결과에 답이 나왔음 - ARM에서 pc 저장 관련 stackoverflow 답변
- 내가
In ARM state, the value of the PC is
the address of the current instruction
plus 8 bytes.
In Thumb state:
For B, BL, CBNZ, and CBZ instructions,
the value of the PC is the address of
the current instruction plus 4 bytes.
For all other instructions that use
labels, the value of the PC is the
address of the current instruction plus
4 bytes, with bit[1] of the result
cleared to 0 to make it word-aligned.
- 즉, ARM mode에서는 pc+8 이, thumb mode에서는 pc+4 라는 이야기이며, ARM mode와 thumb mode를 구분하는 방법은
$CPSR(Current Program Status Register)레지스터를 통해 가능함 - CPSR 관련 참조 링크 :
CPSR의 5 번째 bit가 1이면 thumb mode이고, 0이면 ARM mode 라는 이야기 - 실제 동적분석을 통해 확인해본 결과
Key1(): ARM mode (즉 현재주소+8)Key2(): Thumb mode (즉, 현재주소+4)Key3(): 확인 불필요,$lr만 있으면 됨
2. 결과값 계산
Key1()계산$pc를$r3에 저장하는 단계가0x00008cdc이므로 여기에 8(ARM mode)을 더하면0x8CE4
Key2()계산$pc를$r3에 저장하는 단계가0x00008d04이므로 여기에 4(Thumb mode)를 더하면0x8d08인데, 4를 더하는 단계가 한번 더 있으므로 결론은0x8d0c0x00008d04 <+20>: mov r3, pc 0x00008d06 <+22>: adds r3, #4
Key3()계산key3()이후 리턴되는 주소이므로0x8d800x00008d7c <+64>: bl 0x8d20 <key3> 0x00008d80 <+68>: mov r3, r0
- 최종결론은 0x8ce4 + 0x8d0c + 0x8d80 = 0x1a770 = 108400
3. Exploit